
About
Hi! I’m Tae, a Master’s student in Computer Science (AI specialization) at Stanford University, advised by Professor Shuran Song and Professor C. Karen Liu. I earned my B.S. in Computer Engineering with a minor in Robotics from Northeastern University, where I was advised by Professor Michael Everett. I’m passionate about developing and researching embodied AI, with a focus on robot learning.
Publications
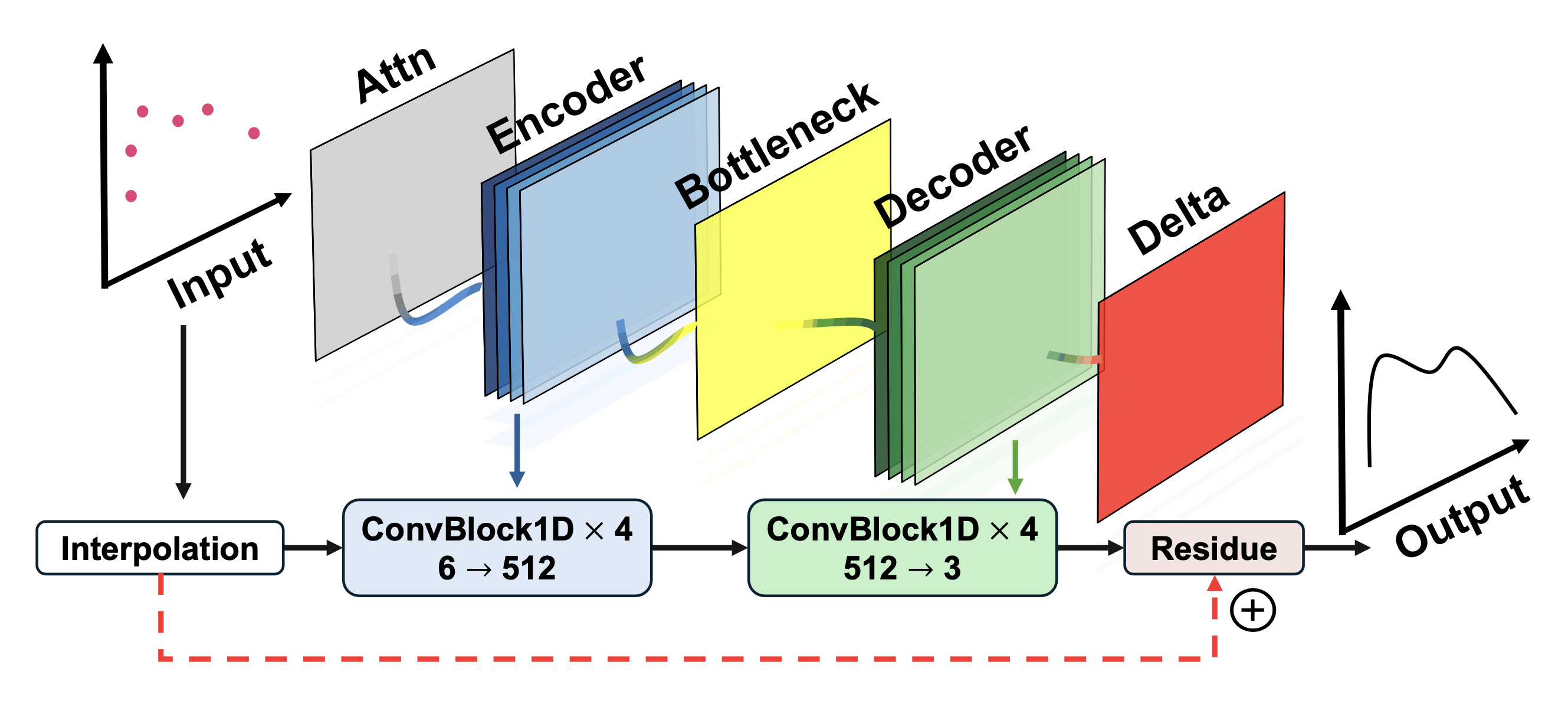
Toward Intelligent Design and Measurement of MEMS Acoustic Wave Resonators
IEEE Transactions on Microwave Theory and Techniques (TMTT), 2026
Selected Projects
ToddlerBot 2.0: Open-Source ML-Compatible Humanoid Platform
Dec 2024 - Aug 2025
Robotics and Embodied Artificial Intelligence (REAL) Lab and The Movement Lab, Stanford University
- Contributed to the 2.0 release by improving the custom keyframe animation app and adding non-physics motion generating and RL training tools.
- Built an RL training pipeline with custom terrain generation, integrated stereo depth perception using the deep learning model FoundationStereo, and added RGB-D rendering and elevation mapping features in simulation.


Go1 DLIOM-Based Autonomous Navigation
Jan 2024 - Aug 2024
Autonomy & Intelligence Lab, Northeastern University
- Configured Unitree Go1 robot dog with 3D LiDAR sensor fixture and ROS2 environment on robot's Jetson board.
- Integrated state estimation from DLIOM (Direct LiDAR Inertial Odometry and Mapping) with ROS2 Nav2.
- Achieved robot navigation with custom nodes that convert velocities from Nav2 to robot's high-level SDK commands.
Teaching Assistant
Stanford University
Winter 2026
Autumn 2025
Northeastern University
Spring 2024
Spring 2023